Homayoon Kazerooni Berkeley Robotics & Human Engineering Laboratory, UC Berkeley
Fall 2019
Skills
Technical: Mechanical Design
Computer: ANSYS, SOLIDWORKS
Language: Technical Writing
Team
Mechanical Masters Capstone Group of Six
Industry Partner: SuitX
Project Summary
The BackX developed by SuitX exoskeleton massively reduces the moment applied to a worker’s lower spine when bent over, reducing the risk of back pain for workers like package handlers, roofers, and other tradesmen. In order to improve the product, the passive device was transformed to actively track and move with the user’s movements, eliminating internal motor resistances when performing actions like walking up slopes or bending over while walking. Additionally a new force sensor configuration was designed to decrease the width of the device and increase reliability of readings.
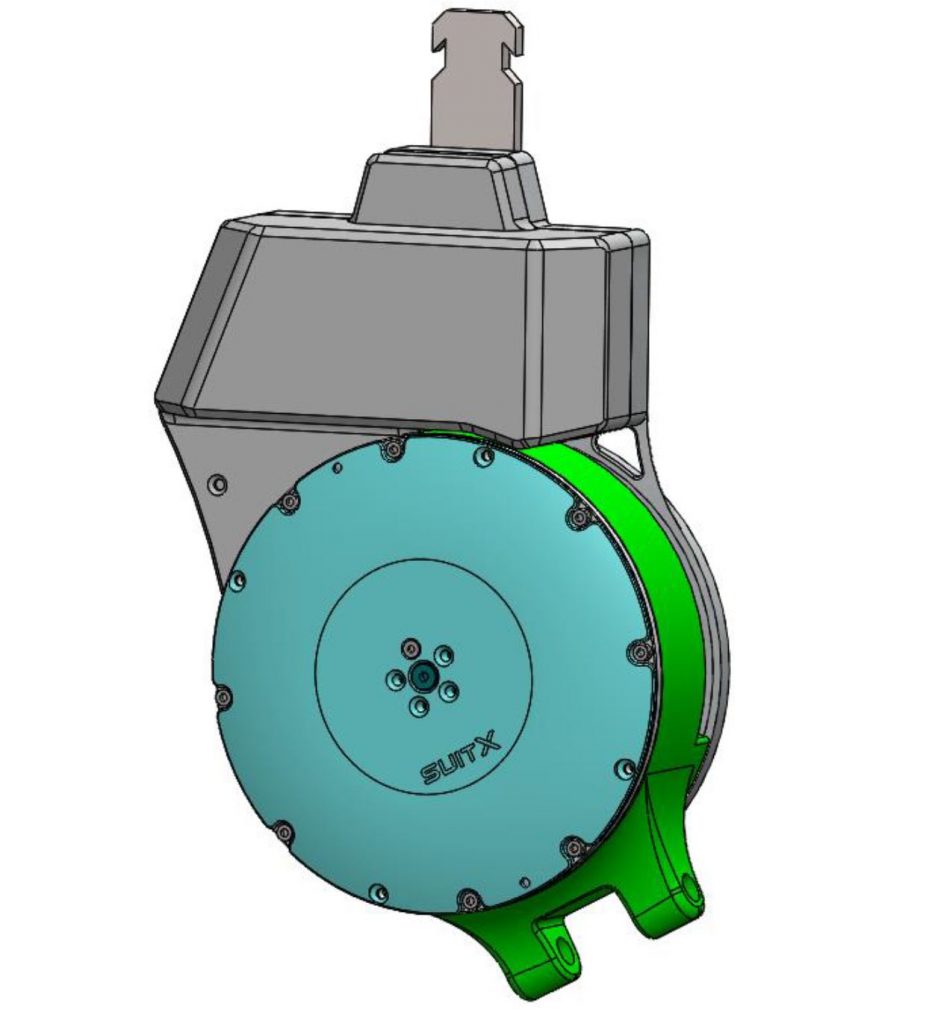
Exterior of the future active hip component. The interior is protected under an NDA.
Background
According to the Department of Labor, back injuries in the workplace continue to one of the leading causes of disabilities and can result from either a single trauma event or repeated flexion. In order to address this issue SuitX developed a passive actuator device called BackX that provides an assistive upward force to the torso when bending. Although the current BackX boasts impressive figures, such as reducing lower back torque and force by an average 60% or increasing lifting productivity by 50%, the device remains limited by impediments in bent or crouched movement and through the inherent disadvantages of a passive device.
To address these issues, a redesign for the BackX was conducted centered around improving a predesigned SuitX motor worn at the hip, replacing the gas spring of the passive device. The new active device would provide assistance to the user through the same upward force, however would be driven by the motor providing a torque relative to sensed loading. The use of on board sensors and advanced controls additionally will prevent resistive torque against the user, addressing the issue of walking while bending and allowing free motion up until a sprint. Through these improvements, the project aims to ameliorate the quality of life and work environment of workers by reducing the severity and frequency of back injuries.
Project Details
Much details of this project are restricted under a NDA and cannot be discussed on this website. However in general, designs focused around improving a predesigned SuitX series elastic actuator and integrating it into a reimagined active version of the BackX device. The motor would be worn at the hip that would provide upward force at the chest while bending, assisting returning to an upright position. Driving principles included incorporating commercial force sensors and position encoders to provide an accurate reaction force and precise position of the motor during bending and locomotion of the user.
Design constraints included protecting the force sensor from high impacts and a spatial restrictions to create the least intrusive device possible. Following design, preliminary stress analysis was conduct in ANSYS and SOLIDWORKS with selected materials on essential dynamic load bearing components of the exoskeleton.

User wearing the passive version of Suit-X’s Back-X to assist in lifting a heavy item.